Mekanik dasar : Stepper Motor
Stepper Motor adalah jenis motor yang putarannya berdasarkan langkah diskrit. Masukan pada stepper motor berasal dari pulsa - pulsa digital. Stepper motor mengubah sinyal listrik menjadi gerakan mekanis diskrit. Torsi dari stepper motor tidak sebesar motor DC namun stepper motor memiliki tingkat presisi yang tinggi dalam putarannya. Stepper motor sering digunakan di 3D Printer
Berdasarkan metode perancangan rangkain pengendalinya, motor stepper dapat dibagi menjadi jenis unipolar dan bipolar. Rangkaian pengendali motor stepper unipolar lebih mudah dibuat karena hanya memerlukan satu signal On Off dengan menggunakan switch / transistor pada masing – maisng lilitannya. Perhatikan gambar lilitan motor stepper unipolar di bawah ini.

Gambar 1. Motor Stepper Unipolar
Untuk menjalankan dan menghentikan motor ini cukup dengan menerapkan pulsa digital yang hanya terdiri atas tegangan positif dan nol (ground) pada salah satu terminal lilitan (wound) motor sementara terminal lainnya dicatu dengan tegangan positif konstan (VM) pada bagian tengah (center tap) dari lilitan.
Untuk motor stepper dengan lilitan bipolar, diperlukan sinyal pulsa yang berubah-ubah dari positif ke negatif dan sebaliknya. Perhatikan gambar di bawah ini.

Gambar 2. Motor Stepper Bipolar
Jadi pada setiap terminal lilitan (A & B) harus dihubungkan dengan sinyal yang mengayun atau berubah – ubah dari positif ke negatif dan sebaliknya. Karena itu dibutuhkan rangkaian pengendali yang lebih kompleks daripada rangkaian pengendali untuk motor unipolar. Motor stepper bipolar torsi yang lebih besar dibandingkan dengan motor stepper unipolar untuk ukuran yang sama. Untuk selanjutnya, pada artikel ini kita hanya akan membahas motor Stepper jenis Unipolar.
Lalu bagaimana Motor Stepper dapat diatur putarannya?
Pada penerapannya di industry, motor stepper dikendalikan dengan bantuan driver. Berikut ini adalah ilustrasi struktur motor stepper sederhana dengan jumlah 4 step untuk 1 putaran penuh dan pulsa yang dibutuhkan untuk menggerakkannya:

Gambar 3. Cara mengatur putaran motor stepper dengan 4 step
Gambar di atas sebelah kiri adalah arah putaran rotor motor stepper dan sebalah kanan adalah logic phase pada setiap step. contoh bentuk pulsa yang diberikan pada kumparan untuk menggerakkan motor stepper pada arah sesuai dengan jarum jam (clockwise). Jika diperhatikan, signal pulsa seolah – olah berjalan dari phase A ke phase B dan seterusnya. Sehingga bagian rotor yang diibaratkan seperti magnet akan berputar karena tertarik oleh gaya magnet yang dibangkitkan oleh setiap phase. Pemberian signal seperti di atas adalah metode full step, sehingga untuk 1 putaran penuh dibutuhkan 4 kali step.
Pada beberapa kasus, setiap pergerakan putaran motor dapat diubah menjadi setengahnya, sehingga untuk menghasilkan 1 putaran penuh diperlukan step dua kali lipat. Dengan kata lain, yang semula hanya perlu 4 step, sekarang menjadi 8 step. Perhatikan gambar di bawah ini:

Gambar 4. Cara mengatur putaran motor stepper dengan 8 step
Untuk selanjutnya, perintah step untuk merubah kondisi logic phase dilakukan dengan memberi pulse atau clock pada driver motor stepper. Dengan demikian, pada metode full step, jika diberikan pulsa sebanyak 8 kali, maka motor akan berputar 2 putaran. Begitu juga jika diberikan pulsa sebanyak 16 kali, maka motor akan berputar 4 putaran. Berapa jumlah putaran jika hanya diberi 3 pulsa? Ya betul, hanya ¾ putaran saja atau 270 derajat. Dari sini dapat kita pahami bahwa untuk mengatur sudut putaran sebuah motor Stepper, maka yang harus diatur adalah jumlah pulsa yang diberikan pada drivernya.

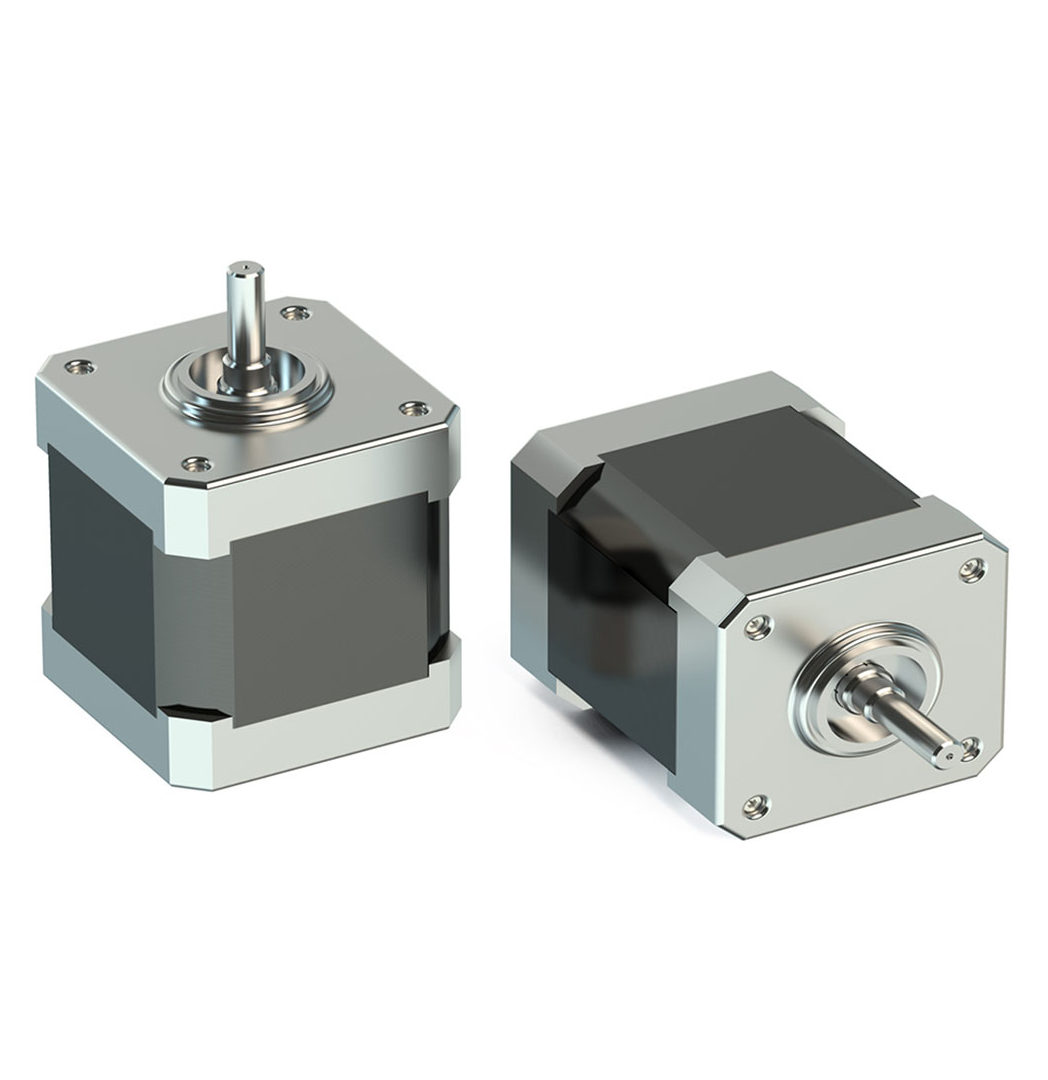
Gambar 5. Spesifikasi Motor Stepper
Setiap motor Stepper akan memiliki spesifikasi utama yaitu berapa derajat motor akan berputar setaip kali diberikan 1 pulse, atau disebut dengan Step/pulse. Misalnya pada gambar di atas, terdapat keterangan motor dengan spesifikasi 0.072o/step, artinya setiap pulse diberikan 1 kali maka motor akan bergerak sejauh 0.072o. Dengan menghitung satu putaran adalah 360 derajat, maka diperlukan 5000 pulse agar motor tepat berputar 1 putaran penuh. Di beberapa penyebutan spesifikasi yang lain dinyatakan dalam bentuk pulse per rotation (ppr), misalnya 5000 ppr. Dengan demikian, seberapa besar sudut putaran yang diharapkan dapat dikendalikan dengan mengatur jumlah pulsa yang diberikan kepada motor tersebut.
Seperti halnya motor listrik yang lain, motor stepper dapat kita kendalikan kecepatannya. Dengan mengambil pemahaman bahwa motor stepper berputar sekian derajat setiap kali diberikan pulse, maka semakin cepat jeda antar pemberian pulse 1 ke pulse berikutnya (T) maka gerakan motor stepper juga akan semakin cepat. Dengan kata lain, pengaturan kecepatan motor Stepper dapat diatur dengan frekuensi pulsa yang diberikan.
Contoh, pada sebuah motor stepper yang memiliki 5000 ppr, jika ingin berputar dengan kecepatan 1 rps, maka diperlukan 5000 pulse tiap detik, atau 5 kHz. Atau jika diinginkan berputar 2 rps, maka frekuensi yang harus diberikan adalah 10 kHz.
sumber :
http://jagootomasi.com/motor-stepper-prinsip-kerja-dan-pengendalian-pada-otomasi-industri/
https://www.youtube.com/watch?v=VfqYN1eG9Zk&ab_channel=RealPars
About us